CAN interface

Example available on GitHub. Check liteboard CAN example.
|
|
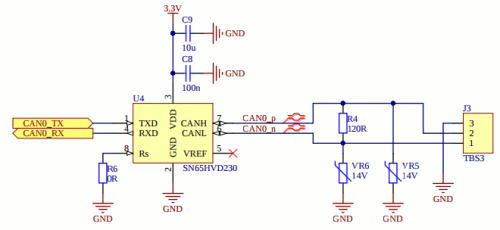
CAN interface is a message-oriented multi-master serial communications protocol which efficiently supports distributed realtime control.
liteSOM contains two CAN modules compatible with |
Device Tree
can1: flexcan@02090000 {
compatible = "fsl,imx6ul-flexcan", "fsl,imx6q-flexcan";
reg = <0x02090000 0x4000>;
interrupts = <GIC_SPI 110 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_CAN1_IPG>,
<&clks IMX6UL_CLK_CAN1_SERIAL>;
clock-names = "ipg", "per";
status = "disabled";
};
can2: flexcan@02094000 {
compatible = "fsl,imx6ul-flexcan", "fsl,imx6q-flexcan";
reg = <0x02094000 0x4000>;
interrupts = <GIC_SPI 111 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_CAN2_IPG>,
<&clks IMX6UL_CLK_CAN2_SERIAL>;
clock-names = "ipg", "per";
status = "disabled";
};
|
Generic configuration for both
To enable -> Networking support
-> CAN bus subsystem support
-> CAN Device Drivers
-> Platform CAN drivers with Netlink support
-> Support for Freescale FLEXCAN based chips
This option will activate FLEXCAN driver. Documentation for this driver you can find in fsl-flexcan.txt file. |
&iomuxc {
pinctrl-names = "default";
pinctrl_flexcan1: flexcan1grp{
fsl,pins = <
MX6UL_PAD_UART3_RTS_B__FLEXCAN1_RX 0x1b020
MX6UL_PAD_UART3_CTS_B__FLEXCAN1_TX 0x1b020
>;
};
};
&can1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan1>;
status = "okay";
};
|
|
SocketCAN
Linux supports CAN interface via SocketCAN.
SocketCAN is defined on top of the network layer therefore it can be automatically configured via /etc/network/interfaces file
auto can0
iface can0 inet manual
pre-up /sbin/ip link set can0 type can bitrate 125000
up /sbin/ifconfig can0 up
down /sbin/ifconfig can0 down
or configured in the runtime by the following commands:
ifconfig can0 down- disabling CAN interface,ip link set can0 type can bitrate 250000- changing CAN bus baudrate to 250kbps,ifconfig can0 up- enabling CAN interface.
CAN bus info
SocketCAN provides to the userspace various information about current CAN bus status.
SocketCAN version
# cat /proc/net/can/version rev 20120528 abi 9
CAN status
# ifconfig can0
can0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
UP RUNNING NOARP MTU:16 Metric:1
RX packets:1 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:1 overruns:0 carrier:1
collisions:0 txqueuelen:10
RX bytes:8 (8.0 B) TX bytes:0 (0.0 B)
Interrupt:19
# ip -details link show can0
2: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT group default qlen 10
link/can promiscuity 0
can state ERROR-ACTIVE (berr-counter tx 0 rx 0) restart-ms 0
bitrate 461538 sample-point 0.846
tq 166 prop-seg 5 phase-seg1 5 phase-seg2 2 sjw 1
flexcan: tseg1 4..16 tseg2 2..8 sjw 1..4 brp 1..256 brp-inc 1
clock 30000000
CAN statistics
# cat /proc/net/can/stats
2 transmitted frames (TXF)
1 received frames (RXF)
0 matched frames (RXMF)
0 % total match ratio (RXMR)
0 frames/s total tx rate (TXR)
0 frames/s total rx rate (RXR)
0 % current match ratio (CRXMR)
0 frames/s current tx rate (CTXR)
0 frames/s current rx rate (CRXR)
0 % max match ratio (MRXMR)
1 frames/s max tx rate (MTXR)
1 frames/s max rx rate (MRXR)
0 current receive list entries (CRCV)
0 maximum receive list entries (MRCV)
can-utils
Buildroot allows you to build various tools developed by can-utils project.
To compile can-utils package please enable BR2_PACKAGE_CAN_UTILS option located in
-> Target packages
-> Networking applications
-> can-utils
To check description about all implemented by can-utils applications please read project README file.
Below you can find few examples with frequently used commands.
CAN sniffer
# candump -x can0 can0 TX - - 1000101F [0] can0 RX - - 10B05002 [8] 00 00 00 00 00 00 00 00 can0 RX - - 10B05001 [8] 00 00 00 00 00 00 00 00 can0 RX - - 10B05004 [8] 82 85 00 00 80 00 00 00 can0 RX - - 10B0F002 [8] 00 00 00 00 00 00 00 00 can0 RX - - 10B0F001 [8] 00 00 00 00 00 00 00 00 can0 RX - - 10B0F004 [8] 87 85 00 00 80 00 00 00 can0 RX - - 10B19002 [8] 00 00 00 00 00 00 00 00 can0 RX - - 10B19001 [8] 00 00 00 00 00 00 00 00 can0 RX - - 10B19004 [8] 8C 85 00 00 A3 00 00 00
CAN sender
To send 0 length data frame to the node with address 1000101F you can use following command
cansend can0 1000101F#
To send remote frame to the node with address 1000101F you can use following command
cansend can0 1000101F#R
CAN bus load test
To test CAN bus load performance you can use following command
canbusload can0@125000 -r -t -b -c
C/C++ API
In case when you want to develop your own application to access CAN bus via SocketCAN please check Section 4 in SocketCAN readme file.
In most cases access to the CAN bus looks like access to the linux network interface . Please check pseudo-code example presented below.
int s; struct sockaddr_can addr; struct ifreq ifr; /* * Open connection with CAN bus */ s = socket(PF_CAN, SOCK_RAW, CAN_RAW); strcpy(ifr.ifr_name, "can0" ); ioctl(s, SIOCGIFINDEX, &ifr); addr.can_family = AF_CAN; addr.can_ifindex = ifr.ifr_ifindex; bind(s, (struct sockaddr *)&addr, sizeof(addr)); /* * build CAN data frame */ struct can_frame frame; frame.can_id = node_id | CAN_EFF_FLAG; // node id + extended frame format frame.can_dlc = 6; // data frame length frame.data[0] = 0x11; // data frame first byte frame.data[1] = 0x22; frame.data[2] = 0x33; frame.data[3] = 0x44; frame.data[4] = 0x55; frame.data[5] = 0x66; // data frame last byte /* * send data frame via CAN bus */ write(s, &frame, sizeof(frame));
Python API
Via Buildroot BR2_PACKAGE_PYTHON_CAN option located in
-> Target packages
-> Interpreter languages and scripting
-> External python modules
-> python-can
you can build python-can Python3 package.
Please read python-can documentation to check how to access CAN from python based application.